Abstract
Multimodal foundation models offer a promising framework for robotic perception and planning by processing sensory inputs to generate actionable plans. However, addressing uncertainty in both perception (sensory interpretation) and decision-making (plan generation) remains a critical challenge for ensuring task reliability. We present a comprehensive framework to disentangle, quantify, and mitigate these two forms of uncertainty. We first introduce a framework for uncertainty disentanglement, isolating perception uncertainty arising from limitations in visual understanding and decision uncertainty relating to the robustness of generated plans.
To quantify each type of uncertainty, we propose methods tailored to the unique properties of perception and decision-making: we use conformal prediction to calibrate perception uncertainty and introduce Formal-Methods-Driven Prediction (FMDP) to quantify decision uncertainty, leveraging formal verification techniques for theoretical guarantees. Building on this quantification, we implement two targeted intervention mechanisms: an active sensing process that dynamically re-observes high-uncertainty scenes to enhance visual input quality and an automated refinement procedure that fine-tunes the model on high-certainty data, improving its capability to meet task specifications. Empirical validation in real-world and simulated robotic tasks demonstrates that our uncertainty disentanglement framework reduces variability by up to 40% and enhances task success rates by 5% compared to baselines. These improvements are attributed to the combined effect of both interventions and highlight the importance of uncertainty disentanglement which facilitates targeted interventions that enhance the robustness and reliability of autonomous systems.
Framework Overview
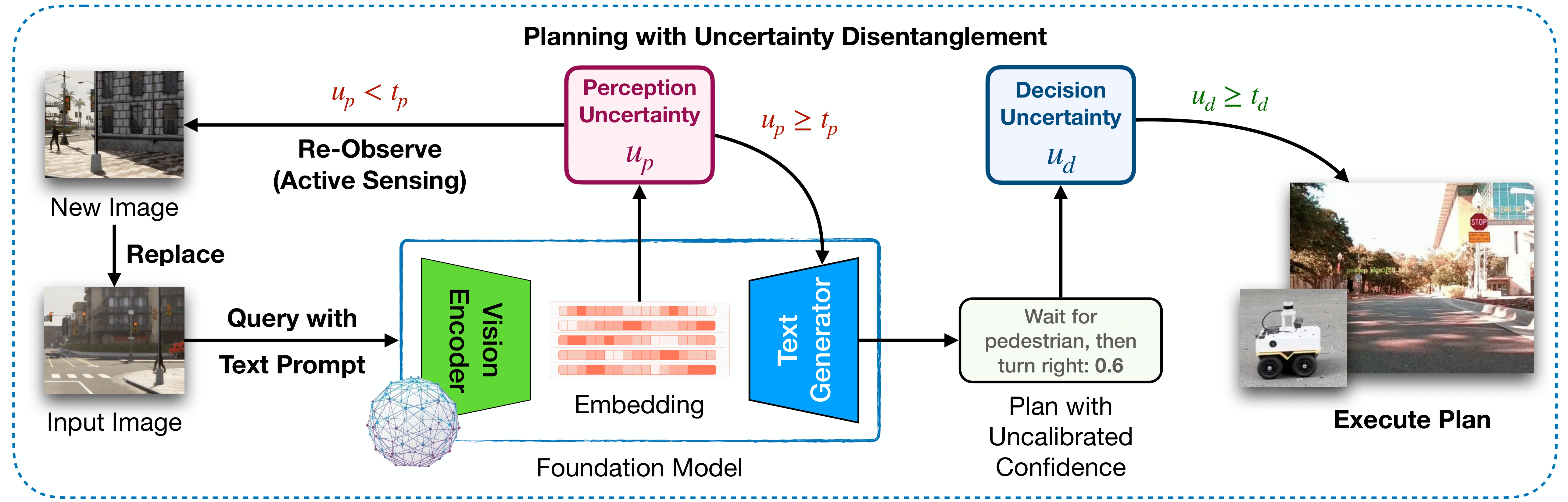
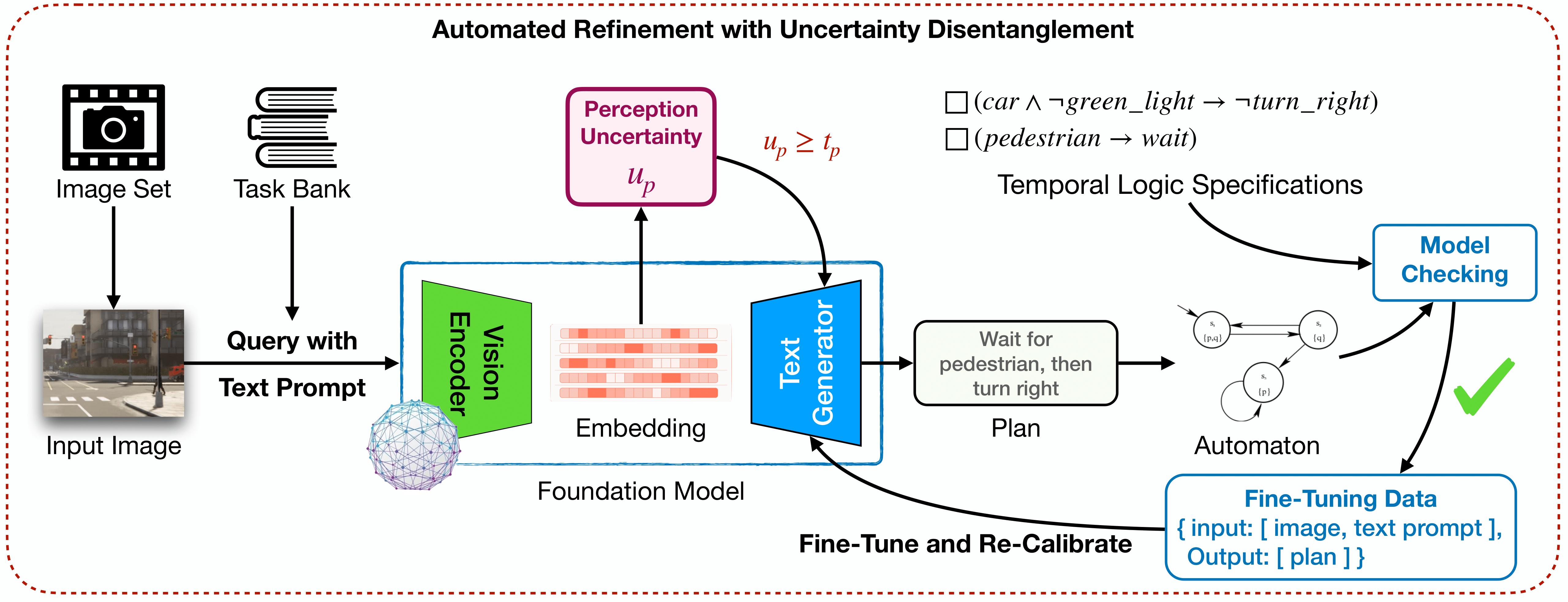
Overview of the planning and refinement frameworks. Our planning framework disentangles perception and decision uncertainty, triggering the active sensing intervention. The framework improves the robustness of generated plans by reducing the propagation of perceptual inaccuracies. Our automated refinement framework generates high-certainty training data and fine-tunes the foundation model to improve its ability to generate plans that comply with task requirements.
Related Links
BibTeX
@inproceedings{bhatt2025knowyoureuncertainplanning,
title={Know Where You're Uncertain When Planning with Multimodal Foundation Models: A Formal Framework},
author={Neel P. Bhatt and Yunhao Yang and Rohan Siva and Daniel Milan and Ufuk Topcu and Zhangyang Wang},
year={2025},
booktitle={Proceedings of the Seventh Annual Conference on Machine Learning and Systems},
address={Santa Clara, CA, USA},
publisher={mlsys.org},
}